Drone
Software augmented testing for drone perception systems.
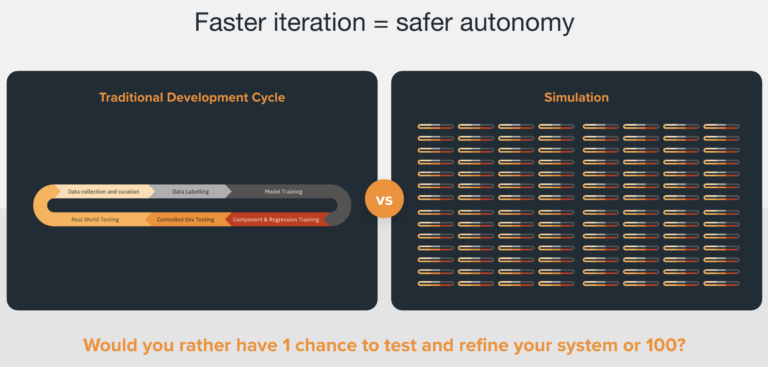
Real-fidelity neural reconstructions and deterministic sensor simulation enable safe, scalable testing of drone perception across every altitude, terrain, and flight condition.
Challenges with Drone Perception Development

Safe, Reliable Perception
Edge Cases – Unique scenarios are critical for model accuracy and safety, but rarely seen in the real-world and often unsafe or impossible to capture
Observability – Changes to a perception model can have unintended consequences that are not observable until tested in the real-world
Safety – Crashes can lead to litigation, regulatory scrutiny, and diminish brand perception
Solution – Continuously evaluate both standard and edge-case scenarios in a virtual world designed to mimic the real-world
Time, and Cost
New drone sensor rigs, and sensor types require recapturing sensor data, labeling, curation, and QA
Entering new geographic markets requires new data and overcoming regulatory hurdles
Regulation is constantly changing and evolving requiring rework to perception models
Solution – Generate the scenarios, test suites, and datasets you need in days, not months
Scalability Across Airframes and Mission Profiles
New drone sensor rigs, and sensor types require recapturing sensor data, labeling, curation, and QA
Entering new geographic markets requires new data and overcoming regulatory hurdles
Regulation is constantly changing and evolving requiring rework to perception models
Solution – Simulate new camera configurations, environments, and scenarios by updating code, not recapturing data
PD Replica + PD Sim for drone perception across every flight regime.
Evaluate
Analyze
Train
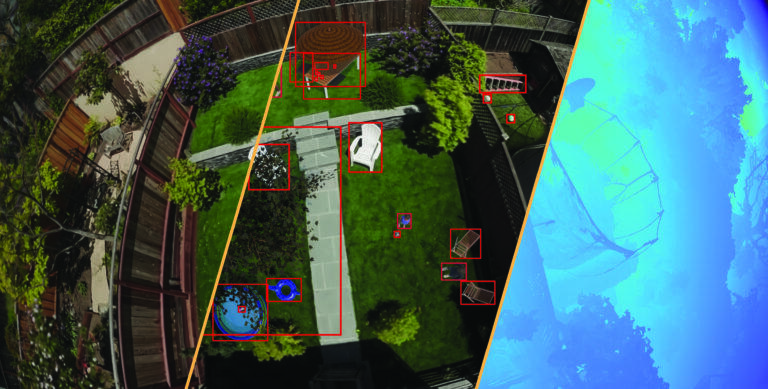
PD Replica - Closing the sim-to-real gap with real environments
Incorporate real-world scans as fully annotated, simulation-ready environments seamlessly integrated into Parallel Domain’s Data Lab API. Experience unparalleled variety and realism for model testing, training, and validation
Addressing Industry Challenges
Test beyond flight-hour limitations
Scale across airframes and mission profiles
Ensure safe operation in shared airspace
Schedule a Demo
See how PD can accelerate your drone perception development with high-fidelity synthetic data and deterministic sensor simulation.