PD Sim: Bring the World to Life
Deterministic multi-sensor simulation that scales to millions of test miles — at a fraction of the cost of real-world driving.
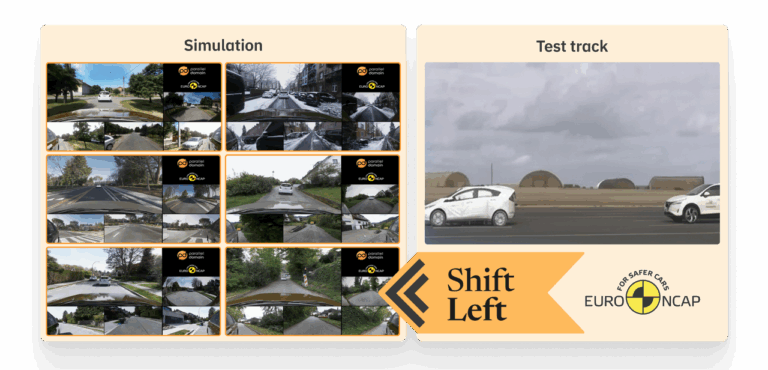
Why Determinism Matters
Same scenario, same result. Every time.
When a perception test fails, you need to know why. PD Sim is deterministic by design:
- Reproducible failures — Identical inputs in, identical perception output every run.
- Meaningful regression testing — Comparable results across builds.
- Auditable test campaigns — Independently verifiable by regulators.
- Systematic variation — Control every parameter explicitly.

Multi-Sensor Simulation
Camera. Lidar. Radar.
PD Sim renders physically-based sensor outputs for your full rig inside real-locations.
Camera
- Pinhole and fisheye lens models
- Multi-camera rigs, rolling shutter, HDR
Lidar
- Physically-based return intensity
- Rain, fog, dust attenuation
Radar
- Material-dependent reflectivity
- Synchronized with camera and lidar
Economics of Simulation
Millions of test miles. A fraction of the cost.
PD Sim inverts the economics:
- Data collection — Marginal cost approaches zero.
- Edge cases — Script it. Run 10,000 variations tonight.
- Sensor rig changes — Update a config. Done by morning.

Scalability
From one scenario to one million. Same API.
Built for validation campaigns:
- Scale — Parameterized templates, thousands of variations.
- Parallel Execution — Hours instead of weeks.
- CI/CD — Every model update tested before it ships.
- Fleet-Scale — Every mile becomes a reusable test asset.

Developer Experience
Scripted in Python. Integrated with your stack.
Your tests are Python scripts — version-controlled, CI-triggered.
- Python SDK — Full programmatic control.
- Closed-Loop — Connect to your autonomy stack.