
Replicas, not reconstructions
A PD Replica delivers a simulation-ready, dynamic world reconstruction. These capabilities are required for production-scale simulated testing and training of AI systems.
- Static and Dynamic Reconstruction
A geometrically accurate reconstruction of the environment and all moving actors. Automatically resimulate exactly what you captured in the real-world. Then modify, remove, or recompose any actor or action into new simulations. - Physics-aware World
A collision layer that enables realistic vehicle dynamics, object interactions, and physics simulation inside the reconstruction. - Camera, Lidar, Radar
Simulate camera, lidar, and radar in any Replica, with support for large multi-sensor rigs. Replicas deliver accuracy, consistency and determinism across multi-sensor and multi-modal setups. - Insert Entirely New Agents
Add new actors to any simulation and calibrated lighting conditions and scene metadata take care of the rest, ensuring that inserted objects match the original scene. - Segmentation Labels
Semantic and instance segmentation across the entire environment (roads, lanes, vehicles, pedestrians, vegetation, signage), enabling ground-truth generation for perception training and validation. - Fully Annotated HD Map
A complete navigation map with lane geometry, traffic rules, and routing information, enabling planning and prediction stack testing.
Other tools give you parts. PD Replica gives you the whole thing.

Real-world data in. No perfection required.
Fleet capture data is messy. GPS drifts. Lidar coverage is sparse. Cameras are poorly synchronized. Most reconstruction pipelines break under these conditions.
PD Pose Engine is built for this reality:
- GPS Drift and Noise — Robust pose estimation that recovers accurate trajectories even when GPS is unreliable.
- Sparse and Uneven Sensor Coverage — Works with the sensor density your fleet actually has.
- Multi-Sensor Misalignment — Handles timing offsets and calibration drift between cameras, lidar, and IMU.
- Heterogeneous Fleet Data — Different vehicles, different sensor configs, different dates. PD Pose Engine normalizes across your fleet.
Stop re-driving routes with specialized equipment. Start using the petabytes your fleet already collected.
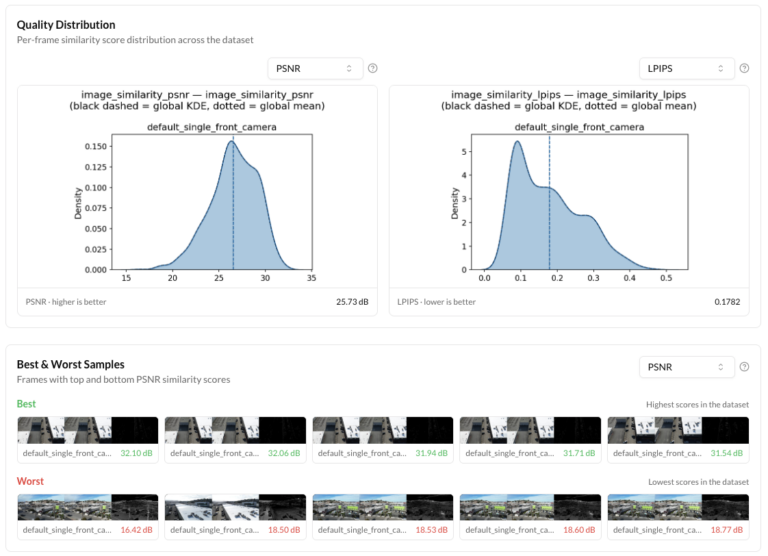
Quantified trust, not visual intuition
A replica that “looks good” isn’t good enough for safety-critical testing. Your validation team needs quantitative proof of how closely simulation matches reality.
PD Replica includes automated sim-to-real gap reporting:
- Geometric Fidelity — Automated comparison of reconstructed geometry against source sensor data.
- Appearance Fidelity — Pixel-level comparison between rendered images and real camera frames.
- Annotation Accuracy — Validation of segmentation labels, map annotations, and object classifications.
Every replica ships with a quality report. You know exactly what you’re getting — and you can prove it.
Scale: Long enough to drive. Wide enough to test.
A PD Replica isn’t a single intersection or a 30-second clip. We reconstruct corridors up to 3 km long, contiguous and continuous. That’s long enough to test a full lane change, an interchange merge, a weather transition through a mountain pass, or a complete freight-terminal approach.The result: closed-loop testing where the route, the actors, and the environment all hold for the full duration of a meaningful driving scenario, not just a snapshot. Validation reads the way a real test mile reads, not the way a simulator demo does.

Not a demo. Not a prototype. Deployable testing infrastructure.
“Production-ready” gets thrown around. Here’s what it means at Parallel Domain:
- Pipeline, not project — Data in, replica out. Repeatable. Automated. Scales with your fleet.
- API-first — Submit reconstruction jobs, check status, retrieve results via Python API. No manual steps.
- Deterministic outputs — Same input data produces the same replica, every time.
- Multi-sensor by default — Camera, lidar, and radar simulation out of the box. Reconfigure sensor rigs in code.
- Validated before delivery — Every replica includes automated sim-to-real quality metrics.